
A light-emitting diode (LED) is a semiconductor pn-junction diode, which emits light when activated.
Electroluminescence is the governing phenomenon behind this beauty.

Its a radiative recombination of electrons and holes in a material, usually a semiconductor. The excited electrons release their energy as photons - light, and the energy of photon or the energy band gap determines the color of the LEDs.
Owing to the physical dimension of LED, which is often small in area (less than 1mm square), are well integrated in custom optical components to shape its radiation pattern and visual effects.
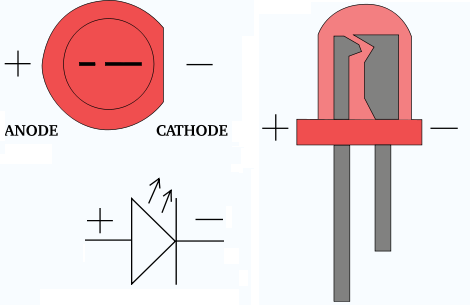
Firstly be aware that a LED is a diode, meaning that it is polarized. By convention, current can only go from the anode (positive end) to the cathode (ground, or negative end).
How do you know which end is which? Note that the two wires on the LED are different lengths. The longer wire is always + and the shorter is -.
There are other ways to tell which lead is which. If you look from the top down, you will notice one side has a flat edge. That edge is ground. If you look inside, you can even tell by the shapes you see.
LEDs are specially constructed to release a large number of photons outward. Additionally, they are housed in a plastic bulb that concentrates the light in a particular direction. As you can see in the diagram, most of the light from the diode bounces off the sides of the bulb, traveling on through the rounded end.

LEDs have several advantages over conventional incandescent lamps.LEDs can have lifetimes of 50,000 hours or more.Owing to their size and packing they are lot more durable and fit more easily into modern electronic circuits.
But the main advantage is efficiency. In conventional incandescent bulbs, the energy is vastly consumed in heat (filament is heated). This is completely wasted energy, unless you're using the lamp as a heater, as a huge portion of the available electricity isn't going toward producing visible light.

On the other hand almighty LED generate very little heat and high vibrant light. A much higher percentage of the electrical power is going directly to generating light, which cuts down on the electricity demands considerably.
Early LEDs were often used as indicator lamps for electronic devices,
replacing small incandescent bulbs. They were soon packaged into numeric
readouts in the form of seven-segment displays, and were commonly seen
in digital clocks.

Light-emitting diodes are now used in applications as diverse as aviation lighting, automotive headlamps, advertising, general lighting, traffic signals, and camera flashes.

However, LEDs powerful enough for room lighting are still relatively expensive, and require more precise current and heat management than compact fluorescent lamp sources of comparable output.
LED chips need controlled direct current (DC) electrical power; an appropriate circuit is required to convert alternating current from the supply to the regulated low voltage direct current used by the LEDs. LEDs are adversely affected by high temperature, so LED lamps typically include heat dissipation elements such as heat sinks and cooling fins.

For more info and cool DIY, visit these sites :








{kind=link}